Heter-Sim: Heterogeneous Multi-Agent Systems Simulation by Interactive Data-Driven Optimization
IEEE Transactions on Visualization and Computer Graphics, 2021, 27(3): 1953-1966.
Jiaping Ren, Wei Xiang, Yangxi Xiao, Ruigang Yang, Dinesh Manocha, and Xiaogang Jin
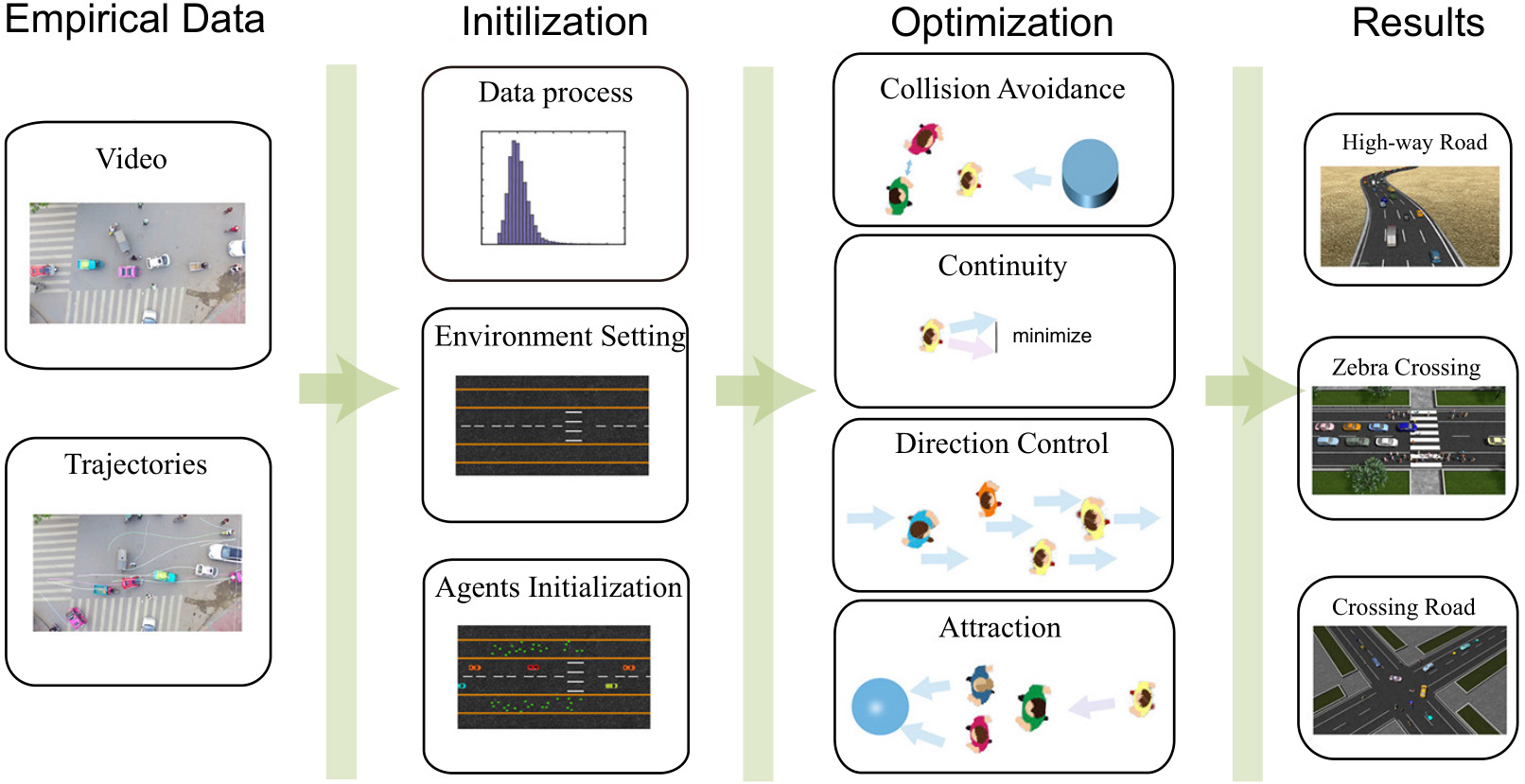
Overview of our data-driven model for simulating heterogeneous multi-agent systems. We highlight different components of our algorithm. The input empirical data can be videos from a top-down view or trajectories of agents. In the initialization, we first transfer real-world data into a consistent format. With the data and environment information set by the users, we initialize the positions and velocities for agents. We treat the motion decision-making or local navigation process of each agent at every timestep as an optimization problem, and the energy function takes into consideration several factors: velocity continuity, collision avoidance, attraction, direction control, and any other constraints defined by users. Our model can simulate heterogeneous agents in the same scenario, including crowds, traffic, any combination of these agents, etc.
Abstract
Interactive multi-agent
simulation algorithms are used to compute the trajectories and behaviors of
different entities in virtual reality scenarios. However, current methods
involve considerable parameter tweaking to generate plausible behaviors. We
introduce a novel approach (Heter-Sim) that combines physics-based
simulation methods with data-driven techniques using an optimization-based
formulation. Our approach is general and can simulate heterogeneous agents
corresponding to human crowds, traffic, vehicles, or combinations of
different agents with varying dynamics. We estimate motion states from
real-world datasets that include information about position, velocity, and
control direction. Our optimization algorithm considers several constraints,
including velocity continuity, collision avoidance, attraction, direction
control. Other constraints are implemented by introducing a novel energy
function to control the motions of heterogeneous agents. To accelerate the
computations, we reduce the search space for both collision avoidance and
optimal solution computation. Heter-Sim can simulate tens or hundreds of
agents at interactive rates and we compare its accuracy with real-world
datasets and prior algorithms. We also perform user studies that evaluate
the plausible behaviors generated by our algorithm and a user study that
evaluates the plausibility of our algorithm via VR.