TraEDITS: Diversity and Irregularity-Aware Traffic Trajectory Editing
IEEE Robotics and Automation Letters (RA-L), 2022, 7(2): 2937-2944.
Yi Han, Jiaping Ren, Shuning Wang, Wenxin Sun, Ruigang Yang, Xiaogang Jin
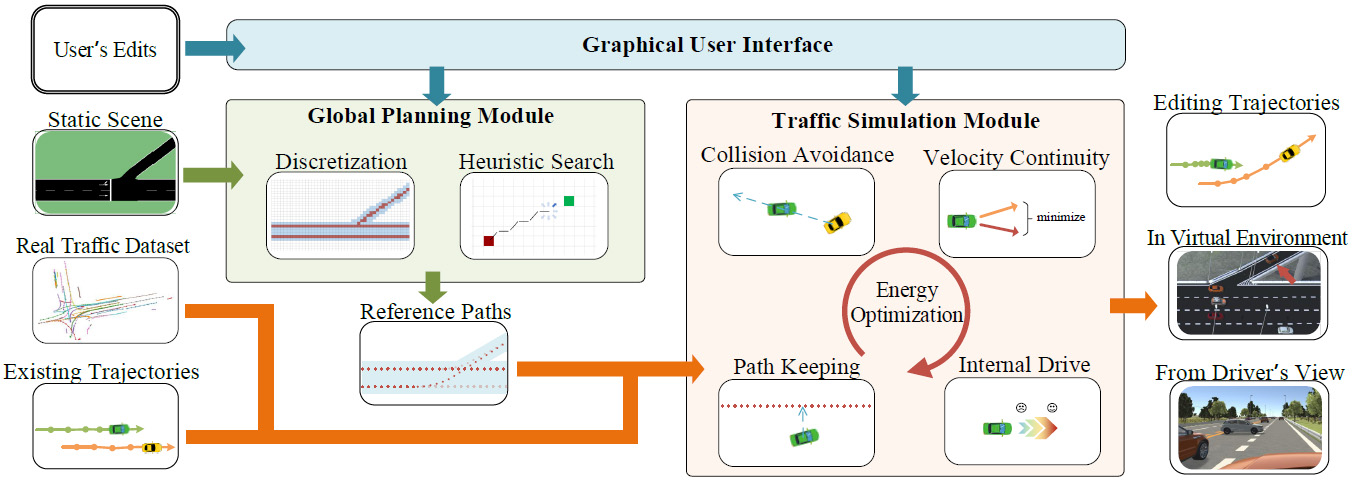
Overview of our TraEDITS framework with data-driven traffic simulation module and global planning module.
Abstract
We present TraEDITS, a
novel traffic trajectory editing framework for autonomous vehicle testing,
which can generate new traffic behaviors by controlling each vehicle
interactively to increase the diversity or irregularity of traffic testing
data. Given a traffic flow with its original trajectories, user’s edits,
environmental constraints, and physical constraints as input, our framework
is able to generate an edited traffic flow through a global path planning
module and a data-driven microscopic traffic flow simulation module. With
the way-points from the user, our global planning module generates
lane-level navigation by heuristic-based path planning in discrete space. By
taking internal properties of the vehicle, velocity continuity, reference
path, and collision avoidance into consideration, our simulation module
generates vehicles’ motions based on energy optimization driven by real
traffic data. Given edits of the desired speed, the lateral deviation, or
the reference path, our approach can generate a new trajectory of the
selected vehicle, and adjust the surrounding vehicles’ trajectories
accordingly. As a result, our framework is able to simulate irregular or
even rare events existing in real traffic. Meanwhile, our framework can
enhance the diversity and irregularity of traffic behaviors and interactions
by creating challenging scenarios like swerve, nudge, and U-turn. We
validate the usability and plausibility of our framework through extensive
experiments and user studies.