A Bio-inspired Model for Bee Simulations
IEEE Transactions on Visualization and Computer Graphics, 2024 (Accepted)
Qiang Chen, Wenxiu Guo, Yuming Fang, Yang Tong, Tingsong Lu, Xiaogang Jin, Zhigang Deng
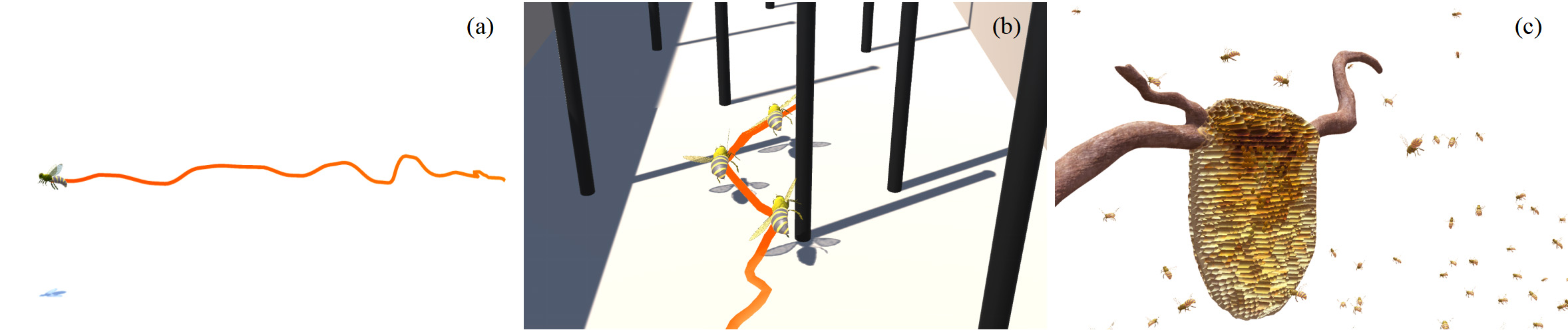
Our bee simulation model enables the fast simulation of previously unseen phenomena, such as (a) a bee’s smooth body oscillation trajectory, (b) visually-based obstacle sensing and roll-to-avoidance motion, and (c) a low-aligned and inherent-noisy bee swarm.
Abstract
As eusocial creatures,
bees display unique macro collective behavior and local body dynamics that
hold potential applications in various fields, such as computer animation,
robotics, and social behavior. Unlike birds and fish, bees fly in a
low-aligned zigzag pattern. Additionally, bees rely on visual cues for
foraging and predator avoidance, exhibiting distinctive local body
oscillations, such as body lifting, thrusting, and swaying. These inherent
features pose significant challenges for realistic bee simulations in
practical animation applications. In this paper, we present a bio-inspired
model for bee simulations capable of replicating both macro collective
behavior and local body dynamics of bees. Our approach utilizes a
visually-driven system to simulate a bee’s local body dynamics,
incorporating obstacle perception and body rolling control for effective
collision avoidance. Moreover, we develop an oscillation rule that captures
the dynamics of the bee’s local bodies, drawing on insights from biological
research. Our model extends beyond simulating individual bees’ dynamics; it
can also represent bee swarms by integrating a fluid-based field with the
bees’ innate noise and zigzag motions. To fine-tune our model, we utilize
precollected honeybee flight data. Through extensive simulations and
comparative experiments, we demonstrate that our model can efficiently
generate realistic low-aligned and inherently noisy bee swarms.