A Practical Model for Realistic Butterfly Flight Simulation
ACM Transactions on Graphics (Will be presented at Siggraph'2022), 2022, 41(3): Article No.: 31.
Qiang Chen, Tingsong Lu, Yang Tong, Guoliang Luo, Xiaogang Jin, Zhigang Deng
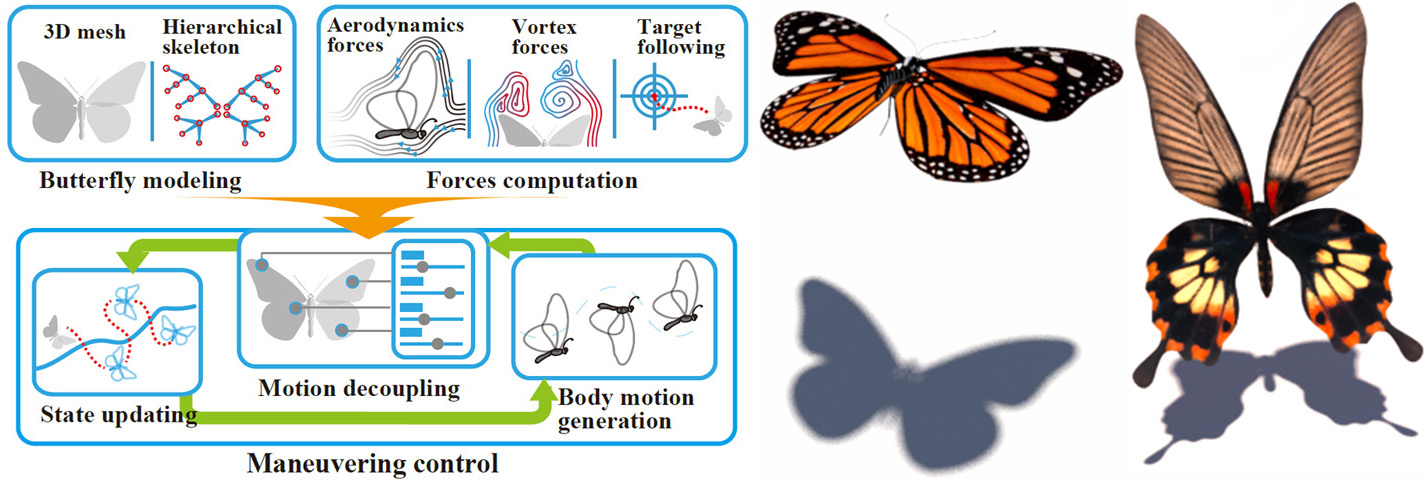
The pipeline of our approach. First, we construct a butterfly mesh model rigged with a hierarchical skeleton. Then, based on the aerodynamics force and the vortex force, we compute the inherent noisy behavior and rapidly-adjusted body motion. Finally, we use an efficient maneuvering control method through motion decoupling to generate butterfly body motion and trajectories.
Abstract
As one of ubiquitous
insects on the earth, butterflies are also widely-known for inspiring thrill
resonance with their elegant and peculiar flights. However, realistically
modeling and simulating butterfly flights, in particular, for real-time
graphics and animation applications, remains an under-explored problem. In
this paper we propose an efficient and practical model to simulate butterfly
flights. Specifically, we first model a butterfly with parametric
maneuvering functions, including wing-abdomen interaction. Then, we simulate
dynamic maneuvering control of the butterfly through our force based model
that includes both the aerodynamics force and the vortex force. Through many
simulation experiments and comparisons, we demonstrate that our method can
efficiently simulate realistic butterfly flight motions in various
real-world settings.