Spatio-temporal Keyframe Control of Traffic Simulation using Coarse-to-Fine Optimization
Computer Graphics Forum (Special Issue of Pacific Graphics'2022), 2022, 41(7): 541-552.
Yi Han, He Wang, and Xiaogang Jin
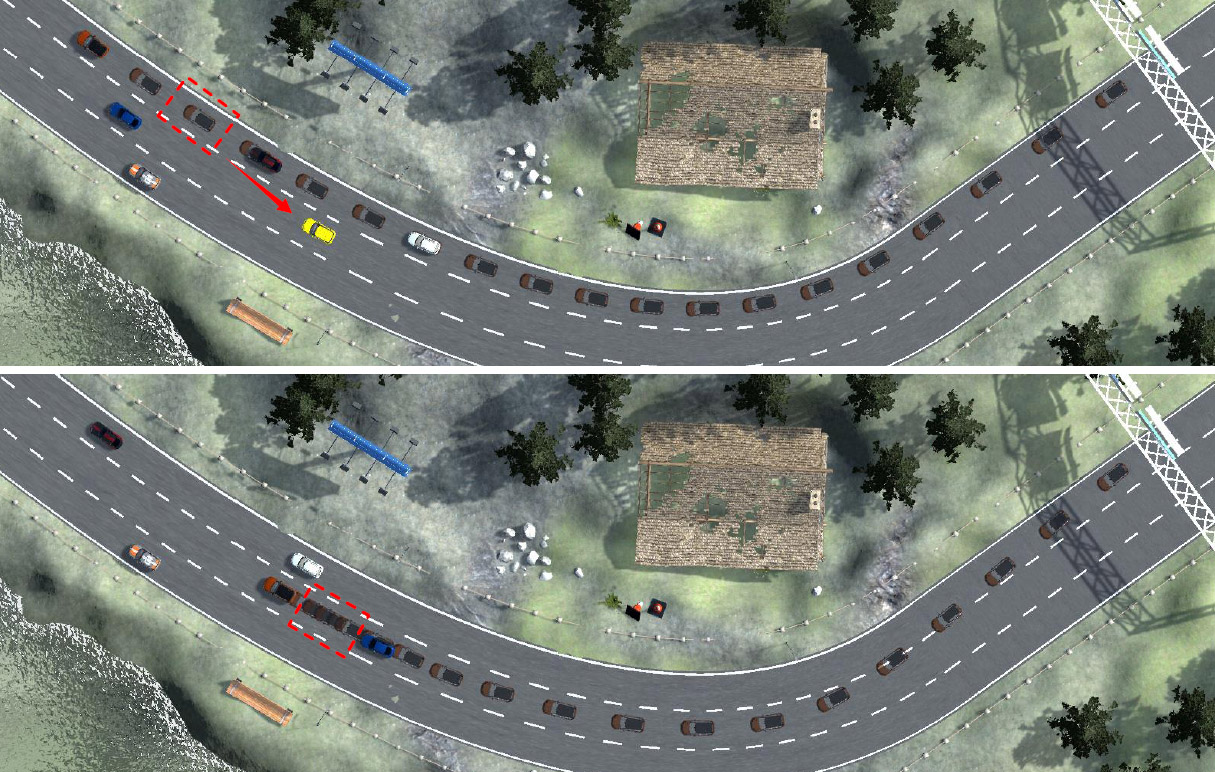
An example of the controlled simulation with a keyframe. (a) The original trajectories. (b) The keyframe controlled trajectories. The vehicle drives along the rightmost lane originally. A keyframe is assigned in the center lane, which denotes that we want the vehicle to arrive at the position marked by the yellow vehicle at the time framed by the red box. As a result, a new reference path is planned through the position at first, and then the vehicle follows it to meet the spatial-temporal constraints smoothly.
Abstract
We present a novel
traffic trajectory editing method which uses spatio-temporal keyframes to
control vehicles during the simulation to generate desired traffic
trajectories. By taking self-motivation, path following and collision
avoidance into account, the proposed force-based traffic simulation
framework updates vehicle’s motions in both the Frenet coordinates and the
Cartesian coordinates. With the way-points from users, lane-level navigation
can be generated by reference path planning. With a given keyframe, the
coarse-to-fine optimization is proposed to efficiently generate the
plausible trajectory which can satisfy the spatio-temporal constraints. At
first, a directed state-time graph constructed along the reference path is
used to search for a coarse-grained trajectory by mapping the keyframe as
the goal. Then, using the information extracted from the coarse trajectory
as initialization, adjoint-based optimization is applied to generate a finer
trajectory with smooth motions based on our force-based simulation. We
validate our method with extensive experiments.