Lab 2 - 图像滤波和傅里叶变换
本次实验我们利用 OpenCV 进行简单的图像滤波。
本次实验内容为课程作业,计算成绩。你需要将源代码、可执行程序(注明运行环境)和实验文档打包并上传至学在浙大学*,压缩包名称为Lab2-学号-姓名.zip/7z。
本次作业提交截止时间:2022年3月14日 23:59:59,逾期将要扣分。
任务清单
- 实现盒状均值滤波
- 实现高斯滤波
- 实现中值滤波
- 实现简单的双边滤波
- 利用傅里叶变换完成图像的频域变换
空域滤波
空域滤波的基本思想是取像素的邻域,将这个邻域内的全部图像信息进行整合以得到对应像素的估计。
均值滤波
均值滤波是一种最简单的滤波方式。它以像素邻域内的平均值代替原先的像素:
均值滤波是线性的,即
。因此我们可以引入一个卷积核,用空域卷积来表示它,我们定义:
那么均值滤波又可以写成
从上面的式子可以看到,这里的卷积核K与图像域坐标(x,y)无关,因此我们说 均值滤波是线性的。
在 OpenCV 中,我们有两种基本方法实现均值滤波:
- 直接依照(1)实现;
- 计算(2)的卷积核,然后按照(3)进行卷积。
其中,图像卷积的计算可以通过 cv::filter2D 完成
图像通常是有边界的,这里我们并没有考虑边界的情形。对于边界,常见的处理方法有下面几种:
- 填充固定像素
iiiiii|abcdefgh|iiiiiii- 重复靠近边缘的某像素
aaaaaa|abcdefgh|hhhhhhh- 重复边缘的倒影
fedcba|abcdefgh|hgfedcb- ……
可以点击
cv::BorderType了解各种常见的边界处理方法。
cv::filter2D函数已经处理了边界,本次实验无需再手工处理边界。
除了手工实现外,如果我们的卷积核是矩形,还可以使用 OpenCV 的 cv:: boxFilter 使用均值滤波器。
本次实验需要你 利用卷积方法 完成图像的均值滤波。你需要手工实现一个名为BoxFilter的可执行程序,用法如下:
BoxFilter <input-image> <output-image> <w> <h>
它使用矩形的卷积核进行均值滤波,其中,w 和 h 是卷积核中心点到边界的距离,卷积核矩阵的大小应当为 (w*2+1)*(h*2+1)。
高斯滤波
通常我们认为图像像素之间的相关性随着距离增加应该不断减弱,但是(1)的均值并没有体现这一性质。在对图像进行均值滤波时,如果图像中有一些很显著的亮点,滤波后它的周围会形成光斑。这正是因为均值滤波无视了距离,对很远处的像素依旧采用同样的权重导致的。一些场合,我们为了美感会需要这种效果。另一些场合,这种结果是不利的,特别是在做图像处理时。
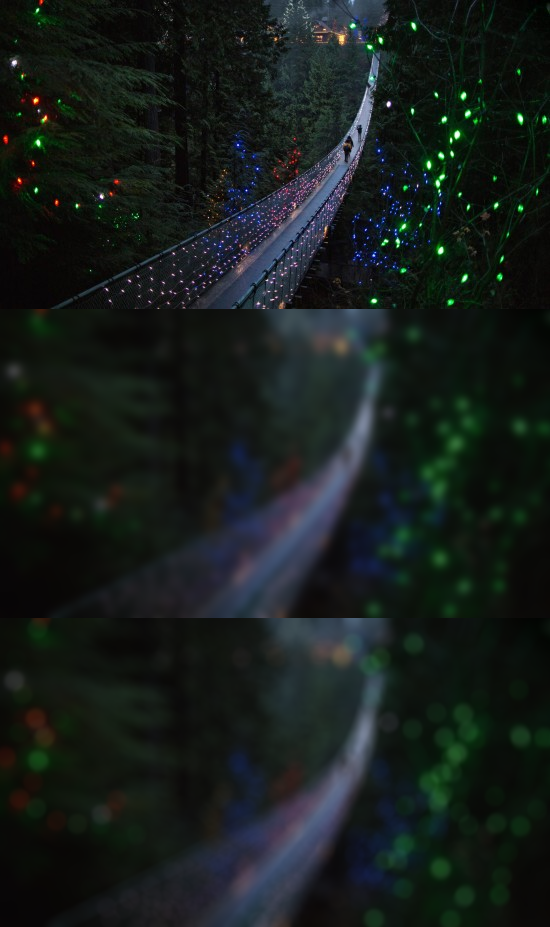
(从上到下:原始图像、高斯滤波和用圆形邻域进行的均值滤波,可以看到灯光在均值滤波下形成了圆形的光斑。)
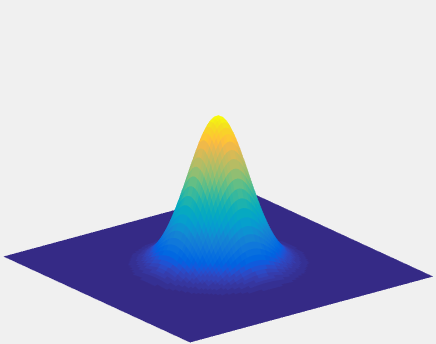
高斯滤波是另一种均匀的线性滤波器,它具有如下形式:
其中 是二维高斯核函数,它的形状如下图:
本次实验需要你实现的第二个任务是高斯滤波,结合前面均值滤波的知识,你需要做的是生成高斯卷积核,然后用它对图片进行滤波。你实现的程序用法如下:
GaussianFilter <input-image> <output-image> <sigma>
其中,sigma 代表了高斯核的参数 ,是一个浮点数。高斯核理论上大小是无穷的,你可以只保留中心的大小,也就是卷积核矩阵大小为 。
OpenCV 提供了
cv::GaussianBlur函数可以用于高斯滤波,本次实验需要你自己建立高斯卷积核,然后使用cv::filter2D进行卷积。
中值滤波
高斯滤波适用于图像带有高斯噪声情况下的去噪。在图像被非高斯噪声污染的情况下,高斯滤波不一定能得到理想的去噪效果。
中值滤波是一种序统计滤波器(Order-Statistic Filter),序统计滤波器是依据邻域的值在统计上的次序关系来进行过滤的。这里,中值滤波器用邻域内像素亮度的中值来取代原本的像素值,即:
中值是将样本集合划分为相同大小的两部分的样本点的值。
由定义可见中值滤波器是非线性的。
椒盐噪声(随机的01噪音)不是高斯的,利用前面的卷积滤波方法不能得到很好的结果。中值滤波对于椒盐噪声有比较好的抑制效果。直观上看,在邻域内的样本中,椒盐噪声平均地分布在最大和最小端,通过取中值可以较好地过滤椒盐噪声。

(中值滤波可以很好地过滤椒盐噪声,第二行的两幅图分别采用 3x3 邻域和 9x9 邻域,更大的邻域使得图像边界变得圆滑。)
本次实验的第三个任务需要完成 盒状邻域 的中值滤波。你需要实现名为 MedianFilter 的程序,用法如下:
MedianFilter <input-image> <output-image> <w> <h>
参数 w 和 h 的含义与均值滤波中对应参数的含义相同。
OpenCV 提供了
cv::medianBlur函数可以用于中值滤波,本次实验需要你自己实现中值滤波,不应当使用该函数。
双边滤波
前面的三种滤波器都会破坏图像的边界,在卷积核很大的时候,均值滤波和高斯滤波都会让边界变得模糊,在邻域很大时,中值滤波会减小边界的曲率。由于物体边界是物体的一个重要特征,很多任务里我们不希望图像边界被破坏。
双边滤波提供了一种降噪同时保持边界的方法。它的思路很简单:如果邻域内像素的亮度差异很大,它在加权平均时的贡献也应当小。我们可以在高斯滤波加权平均的基础上引入一个新的项,反应亮度差带来的加权:
这里是空间距离上的高斯加权,是灰度距离上的高斯加权。
为什么要有 ?两个高斯核还需要的归一项么?
本次实验需要你理解双边滤波的思想,并完成双边滤波。你需要实现名为 BilateralFilter 的程序,用法如下:
BilateralFilter <input-image> <output-image> <sigma-s> <sigma-r>
参数 <sigma-s> 和 <sigma-r> 分别对应和 。
OpenCV 同样提供了
cv::bilateralBlur函数可以用于双边滤波,你不应当在本次作业中使用该函数。
傅里叶变换
大小为W*H的图像I的二维傅里叶变换定义为:
上式定义在复数域中,因此傅里叶变换的输入和输出都是复数域上的。但我们用实数域表示图像,因此在操作时要额外注意类型:变换到频域时,采用复数表达,变换回图像时,只保留实数部分。
在 OpenCV 中,图像的傅里叶变换可以用 cv::dft 函数完成。下面的代码展示了如何进行图像的傅里叶变换:
Mat dft_result(image.size(), CV_32FC2);
dft(image, dft_result, DFT_COMPLEX_OUTPUT);
当输入/输出的矩阵大小满足特殊条件时,
cv::dft函数性能最佳,参考cv::getOptimalDFTSize。
变换后的结果中,左上角对应了零频率。在操作时我们要使用这种格式,但在可视化时我们希望将左上角置于中心。使用下面的函数 fftshift 将零频率移到中央:
// rearranges the outputs of dft by moving the zero-frequency component to the center of the array.
void fftshift(const Mat &src, Mat &dst) {
dst.create(src.size(), src.type());
int rows = src.rows, cols = src.cols;
Rect roiTopBand, roiBottomBand, roiLeftBand, roiRightBand;
if (rows % 2 == 0) {
roiTopBand = Rect(0, 0, cols, rows / 2);
roiBottomBand = Rect(0, rows / 2, cols, rows / 2);
} else {
roiTopBand = Rect(0, 0, cols, rows / 2 + 1);
roiBottomBand = Rect(0, rows / 2 + 1, cols, rows / 2);
}
if (cols % 2 == 0) {
roiLeftBand = Rect(0, 0, cols / 2, rows);
roiRightBand = Rect(cols / 2, 0, cols / 2, rows);
} else {
roiLeftBand = Rect(0, 0, cols / 2 + 1, rows);
roiRightBand = Rect(cols / 2 + 1, 0, cols / 2, rows);
}
Mat srcTopBand = src(roiTopBand);
Mat dstTopBand = dst(roiTopBand);
Mat srcBottomBand = src(roiBottomBand);
Mat dstBottomBand = dst(roiBottomBand);
Mat srcLeftBand = src(roiLeftBand);
Mat dstLeftBand = dst(roiLeftBand);
Mat srcRightBand = src(roiRightBand);
Mat dstRightBand = dst(roiRightBand);
flip(srcTopBand, dstTopBand, 0);
flip(srcBottomBand, dstBottomBand, 0);
flip(dst, dst, 0);
flip(srcLeftBand, dstLeftBand, 1);
flip(srcRightBand, dstRightBand, 1);
flip(dst, dst, 1);
}
为了简化实验,我们只使用单通道图像。我们首先创建一幅 512x512 的单通道浮点数图像 I,在中心放置一个 20x60 的矩形,如下图:
Mat I(512, 512, CV_32FC1);
I = 0;
I(Rect(256-10, 256-30, 20, 60)) = 1.0;
我们将其进行傅里叶变换,得到 512x512 的复(CV_32FC2)矩阵J,然后利用 fftshift 函数将零频率放置到中心。
Mat J(I.size(), CV_32FC2);
dft(I, J, DFT_COMPLEX_OUTPUT);
fftshift(J, J);
我们计算 J 的每个元素的模长:
Mat Mag;
vector<Mat> K;
split(J, K); // 将实数和虚数部分分解到 K[0] 和 K[1]
pow(K[0], 2, K[0]); // 计算平方
pow(K[1], 2, K[1]);
Mag = K[0]+K[1]; // 两个分量的平方和
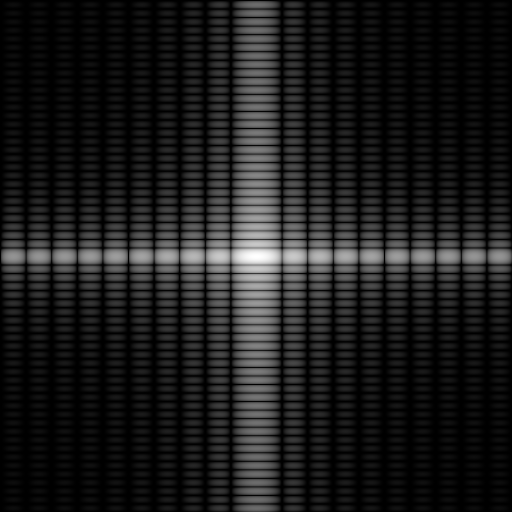
最后,我们将 可视化出来:
Mat logMag;
log(Mag+1, logMag);
normalize(logMag, logMag, 1.0, 0.0, NORM_MINMAX);
// ...
imshow("Magnitude", logMag);
你应当得到如下结果:
你可以尝试对上同的图像进行 DFT 变换,可视化它的结果。
如果我们将矩形进行旋转,结果会怎么变化?平移呢?如果改变矩形的长和宽又会怎么样?
Tips
- 在需要手动处理边界问题时,可以先
cv::copyMakeBorder扩大边界,以使得卷积核可以处理图像最边缘的像素,在处理完之后,使用cv::Rect把原图像区域取出来。
参考资料
- [1] R. C. Gonzalez and R. E. Woods, Digital Image Processing, Third Edition.
- [2] Bilateral Filtering for Gray and Color Images
- [3] Making your own linear filters!