Lab 5 - 非线性最小二乘
本次实验我们实现 Gauss Newton 法求解简单的非线性最小二乘问题。
本次实验内容为课程作业,计算成绩。你需要将源代码、可执行程序(注明运行环境)和实验文档上传至学在浙大,标题为Lab5-学号-姓名,压缩包和文件夹名称都为Lab5-学号-姓名。
本次作业提交截止时间:2024年04月10日 23:59:59,逾期将要扣分。
知识回顾
Gauss Newton 法来源于 Newton Rapson 法,后者利用二次型逼近目标函数。为了进行二次逼近,NR 法需要计算目标函数的 Hessian,但这并不是个容易完成的任务。GN 方法利用最小二乘问题本身的特点,通过计算 Jacobian 来近似 Hessian 。
NR 法采用二阶 Taylor 展开近似目标函数:
最小二乘问题具有 的形式,对 进行一阶 Taylor 展开,可以得到:
(请务必自己推导一次,理解全部过程, Idea: Line search)
将两种展开方式进行对比,可知在最小二乘问题里 。
继续依照 NR 法的思路,每一步迭代中,我们求解如下的标准方程:
这一标准方程对应于求 的(线性)最小二乘解,可以采用共轭梯度法求解。本次实验中,可以直接采用 OpenCV 提供的矩阵算法完成。
得到 后,以它作为下降方向,我们进行线性搜索求出合适的步长,更新 :
这样就得到了 GN 法,GN 法的算法框架如下:
实验要求
本次实验你需要你实现 Gauss Newton 求解最小二乘问题。
接口要求
你需要实现名为 Solver#### 的类,其中 #### 代表你学号的后四位。
这个类需要继承自接口类 GaussNewtonSolver ,我们提供了头文件,请下载 hw3_gn.h 并包含在你的优化器类中。
你需要严格按照接口要求实现,否则会扣分。
GaussNewtonSolver 的定义如下:
class GaussNewtonSolver {
public:
virtual double solve(
ResidualFunction *f, // 目标函数
double *X, // 输入作为初值,输出作为结果
GaussNewtonParams param = GaussNewtonParams(), // 优化参数
GaussNewtonReport *report = nullptr // 优化结果报告
) = 0;
};
- 当你的类的
solve函数被调用时,它将采用 Gauss Newton 法最小化函数f。 - 输入时数组
X内包含初始点,并且在优化后将被修改为最优点,维度需要与目标函数定义的维度一致。 param是 GN 算法运行的各种相关参数。- 如果
report不是空指针,优化完成后应当把相关的报告记录到report。 - 函数返回值是优化得到的目标函数的最优值。
目标函数通过继承接口类 ResidualFunction 进行定义:
class ResidualFunction {
public:
virtual int nR() const = 0;
virtual int nX() const = 0;
virtual void eval(double *R, double *J, double *X) = 0;
};
nR 函数需要返回余项向量的维度。类似的,nX 函数需要返回变量 X 的维度。
eval 运行时读入 X 将计算得到的余项和Jacobian写入 R 和 J 。
- 计算得到的余项向量需要写入到
R,R需要预先分配好,长度为nR。 - 计算得到的 Jacobian 需要写入到
J,J需要预先分配好,大小为nR*nX。 - 输入的
X是一个长度为nX的数组,包含所有的变量。
注意:你的优化器需要负责在优化开始前分配好 R 和 J 需要的空间,在结束后销毁。X 作为输入,由用户(调用 solve 的程序)分配并填充好初始值。
优化的参数通过如下的结构体定义,各个参数的含义见注释。
struct GaussNewtonParams{
GaussNewtonParams() :
exact_line_search(false),
gradient_tolerance(1e-5),
residual_tolerance(1e-5),
max_iter(1000),
verbose(false)
{}
bool exact_line_search; // 使用精确线性搜索还是近似线性搜索
double gradient_tolerance; // 梯度阈值,当前梯度小于这个阈值时停止迭代
double residual_tolerance; // 余项阈值,当前余项小于这个阈值时停止迭代
int max_iter; // 最大迭代步数
bool verbose; // 是否打印每步迭代的信息
};
优化结果的详细信息储存的结构体定义如下,含义见注释。
struct GaussNewtonReport {
enum StopType {
STOP_GRAD_TOL, // 梯度达到阈值
STOP_RESIDUAL_TOL, // 余项达到阈值
STOP_NO_CONVERGE, // 不收敛
STOP_NUMERIC_FAILURE // 其它数值错误
};
StopType stop_type; // 优化终止的原因
double n_iter; // 迭代次数
};
测试问题
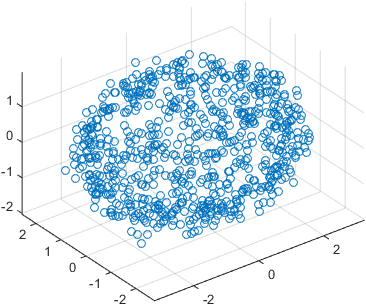
作为测试,我们求解从三维点云拟合椭球的问题,我们的椭球模型是
下载测试数据文件 ellipse753.txt ,其中包含了 753 个含有噪音的点,你需要建立目标函数,然后利用你的优化器最小化目标函数,从这个点云恢复出参数 AA BB CC 。
注意:这个测试问题同样可以用线性最小二乘求解,作业中必须使用非线性最小二乘的形式,但同时你可以用线性最小二乘求解来进行验证。
参考资料:K.Madsen et.al., Methods for Non-Linear Least Square Problems. 2nd Ed., 2014. PDF