近年来,自动驾驶技术已成为国际前沿科技,国家自然科学基金委员会也资助了大量相关研究,有力的推动了自动驾驶技术的进步。为进一步促进自动驾驶算法研究良性高质量发展,实现产-研精准对接,加速研究成果从“书架”走向“货架”,并在竞赛实践中发现技术瓶颈,补足差距,助力自动驾驶实战人才培养,在国家自然科学基金委员会工程与材料科学部、中国汽车工程学会的共同指导下,依托同济大学、国家智能网联汽车创新中心、浙江大学、清华大学等技术力量,第四届OnSite自动驾驶算法挑战赛于2026年5月30日正式启动。
本届赛事深度聚焦AI驱动下自动驾驶技术发展,以前三届赛事成果为基础,全面升级乘用车仿真能力,覆盖三维重建、生成等技术路线;拓展船舶自动驾驶和地外月球车赛道,探索跨域场景。通过赛事引领我国高校自动驾驶研究前沿方向,同步打通产学研需求对接通道,加速前沿算法向产业应用的转化。
其中,第一赛道“感知-规划-控制综合赛”和第四赛道“乘用车行车3DGS赛道”由浙江大学CAD&CG全国重点实验室牵头承办。赛事以仿真在线赛的形式开展,从6月1日开始,历时2个月,目前报名参赛人数已超过200人。
第一赛道——“感知-规划-控制综合赛”

第一赛道面向感知在环的端到端自动驾驶算法测试训练,依托实验室自主研发的智能驾驶虚拟仿真测试与训练平台(VTS,www.zjvts.net)开展测试,基于UE图形渲染引擎构建拟真仿真环境,支持云、雨、雾多天气设置,激光雷达、多目视觉等传感器仿真;场景涵盖高速、城中村复杂路况、机非混行及香港左行等全球化路况,任务包含紧密跟驰、危险换道、进出环岛及机非混行复杂交互,全面考验参赛者在全栈算法适配性与鲁棒性方面的能力。大部分场景基于OpenDrive地图文件和OpenScenario场景案例文件通过自动化3D过程式生成,目前已开放总题量超过600个。

该赛道由浙江大学联合同济大学共同承办,主理人为浙江大学CAD&CG全国重点实验室专职研究员谢天,部分赛道场景由西华大学提供支持。相关技术还支撑第六赛道大件运输赛道(清华大学牵头)、第十赛道训测一体双域融合赛道(同济大学牵头)。
第四赛道——基于高真实感3DGS的端到端测试赛道

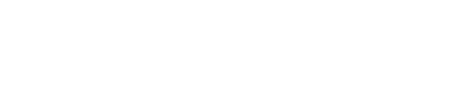
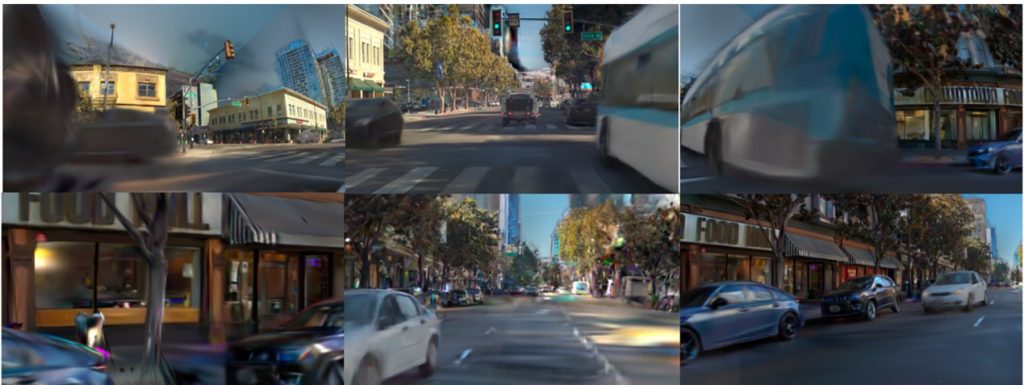
第四赛道面向基于高真实感3DGS的端到端自动驾驶算法闭环测试训练,依托OnSite平台联合CAD&CG全国重点实验室自主研发的高保真仿真测试与训练平台StreetWorld开展测试。待测端到端算法接收6路相机图像、IMU、GPS、车辆动力学状态、车辆位姿和导航指令等输入,并输出转向、油门、制动等可执行控制量。平台场景来源包括国家智能网联汽车创新中心、吉利汽车和Nvidia PhysicalAI Dataset等,涵盖直道、交叉口、下穿通道、桥梁、施工区、停车场、人行横道、匝道、环岛及铁路道口等道路环境,支持晴天、多云、雨天、雾天等天气条件;任务围绕真实场景中的端到端闭环驾驶展开,重点考察算法在复杂道路拓扑、多交通参与者交互、交通规则约束和舒适性约束下的稳定控制能力,评价指标覆盖效率、安全、舒适、交规符合和交通协调五个维度,目前已开放A卷10个流程熟悉案例、B卷100个正式测试案例。
第四赛道由浙江大学联合吉利汽车共同承办,主理人为浙江大学CAD&CG全国重点实验室彭思达研究员,依托OnSite平台与CAD&CG全国重点实验室相关团队研发的StreetWorld平台开展测试。
欢迎感兴趣的相关团队积极报名参与!
更多赛事信息